
機器視覺在軟包動力鋰電池極耳焊接缺陷檢測中有廣泛的應用。通過使用機器視覺技術,可以實現自動化的、高效率的缺陷檢測和質量控制。
機器視覺系統可以對焊接過程中的極耳進行實時監測和檢測。它可以通過圖像處理算法來提取和分析焊接區域的特征,例如焊接點的形狀、大小、位置和顏色等。通過比較預設的標準或模型,機器視覺系統可以確定是否存在缺陷,例如焊接不完整、偏位、斷裂或異常等。
機器視覺系統還可以檢測焊接質量以及其他可能引起缺陷的因素。它可以檢測焊接接頭的表面質量,例如氣孔、裂紋、變形等,并將其與標準進行比較。此外,機器視覺系統還可檢測焊接工藝參數的合理性,例如焊接溫度、壓力和速度等,以確保焊接過程的一致性和穩定性。
本文總結了極耳焊接幾種常見的缺陷,并描述各缺陷的特征,為后續機器的圖像處理和分類識別做準備。
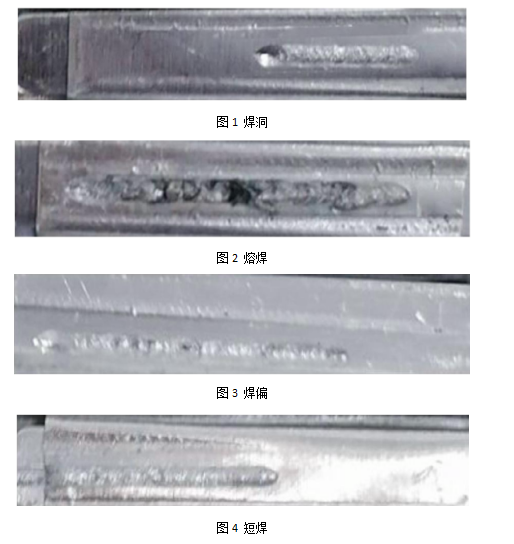
焊洞:由于離焦量選擇不合適,導致局部功率密度過高,由此造成焊穿。
熔焊:此缺陷往往是由于焊接速度不匹配,使得極耳表面受熱不均勻造成的通常表現為缺陷面積更大,且形狀不規則,需要精調焊接速度。
焊偏:是由于激光焊頭沒能與待焊接極耳中心線保持平行造成的,偏離了極耳的中心線。應及時調整激光焊頭的位置角度,避免后續的焊接依次偏離。
斷焊(短焊):通常由于機械械上下振動,使得焊接不連續,造成斷焊缺陷。應檢查機構濾震性,增加緩沖措施缺陷特征表現為焊縫岀現間斷,不連續,或者焊縫較短。
極耳焊縫的圖像分割是指將圖像中的焊縫部分與其他背景區域進行準確的分離和提取。以下是一些常用的極耳焊縫圖像分割方法:
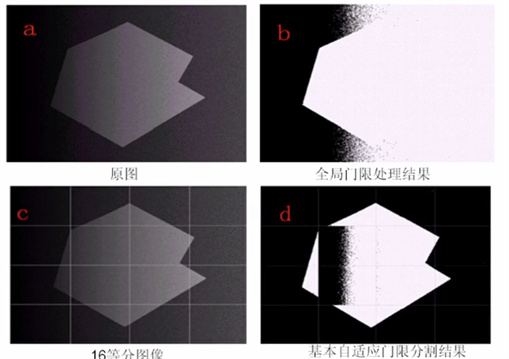
基于閾值分割:這是最簡單且常用的分割方法之一。通過選取適當的閾值,將圖像中的像素分為焊縫區域和背景區域。可以根據焊縫的顏色、亮度或灰度值等特征來確定閾值。
基于邊緣檢測:利用邊緣檢測算法,如Canny、Sobel等,可以提取焊縫邊緣輪廓。然后根據邊緣信息進行區域分割,將焊縫區域與背景區域分開,基于圖像學習:使用機器學習算法,如卷積神經網絡(CNN)等,對包含焊縫和背景的訓練樣本進行學習。然后將訓練好的模型應用于新的圖像,實現焊縫的準確分割。
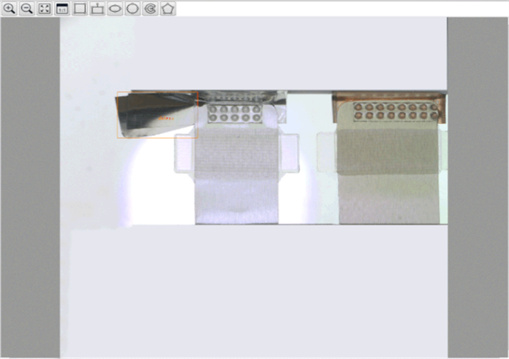
圖6 OPT深度學習極耳裁切邊緣檢測
基于分水嶺算法:這是一種基于圖論的分割方法。通過計算圖像中像素之間的距離或相似度,將圖像分割為多個區域。然后利用分水嶺算法對不同區域進行分割,將焊縫與背景分離。
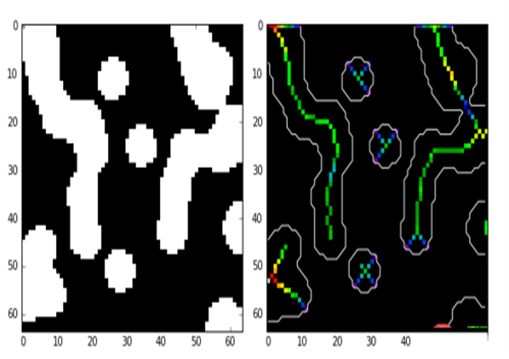
圖7 圖像處理之骨架提取與分水嶺算法
最后采用 OTSU閾值分割法,實現快速分割。具體實現步驟具體如下
(1) 讀取原圖像,進行灰度變換,得到灰度圖像
(2) 采用中值濾波,保留邊緣的同時去除椒鹽噪聲
(3) 根據焊縫結構特點,設定結構元素,進行多尺度對比度提升
(4) 在(3)基礎上,進行形態學混合開閉重建,屏蔽干擾信息,保證焊縫完整性同時進一步增強焊縫目標與背景的對比度
(5) 最后,采用OTSU閾值分割方法,進行焊縫目標提取。
圖8 普通形態學(左) 閾值分割法(右)
本文重建方法的增強效果顯著,能使焊縫有效分割出來,剔除了其他干擾信息;其他方法則不能將焊縫目標與背景分離,仍存在干擾,不利于后續的缺陷檢測。

